Sharing data between threads
First note that if the data shared between threads is never modified then we don’t have a problem at all. The problems start to occur when one or more threads modifies the shared data.
Motivating Example
In the code below we define two functions: void add(int &) and void sub(int &) that increment/decrement the passed parameter by 1.
We create 4 threads: 2 that increment/decrement a variable x and the other 2 do the same for y.
Since, for each variable, the number of increments is the same as decrements, we expect that, if we initialize to 0, that the final result is also 0. As you can see by running the code this is not the case. Note the large number of iterations we are doing in add and sub. If we did a single operations we won’t catch the problem
because in that case the calling thread would finish execution before the system switches to another thread.
#include <iostream>
#include <thread>
#include <vector>
#define NUM_ITERATIONS 100000
#define NUM_TRIALS 6
void add(int& val) {
for (int i = 0; i < NUM_ITERATIONS; ++i)
++val;
}
void sub(int& val) {
for (int i = 0; i < NUM_ITERATIONS; ++i)
--val;
}
int y = 0;
int main()
{
for (int j = 0; j < NUM_TRIALS; ++j) {
std::vector<std::thread > mythreads;
int x = 0;
y = 0;
std::thread t1(add,std::ref(x));
std::thread t2(add, std::ref(y));
mythreads.push_back(std::move(t1));
mythreads.push_back(std::move(t2));
/* using temp thread object no need for std::move*/
mythreads.push_back(std::thread(sub, std::ref(x)));
mythreads.push_back(std::thread(sub,std::ref(y)));
for (auto& t : mythreads)
t.join();
std::cout << "trial " << j << ",x=" << x << ",y=" << y << std::endl;
}
}
You can try a modified version of the above with only one variable and two threads but a larger number of iterations here. Compiler explorer doesn’t allow us to create more than two threads.
Analysis
Consider the assembly code produced by gcc (slightly changed by me) of the add function
use in the previous code. The operation ++var; is basically translated into three steps
- load the value of var into register edx. We will call it
mov var edx. - increment register edx. We will call it
inc edxordec edxif it is decremented. - store the value in edx back to var. We will call it
mov edx var;
add:
pushq %rbp
movq %rsp, %rbp
movq %rdi, -24(%rbp) #store the address of val on the stack
movl $0, -4(%rbp)
movq -24(%rbp), %rax #copy the address of val to rax
.L3:
cmpl $99999, -4(%rbp) #compare with index with 99999
jg .L4 #if index > 99999 goto L4
=> movl (%rax), %edx #copy the value of val to edx
=> inc %edx #increment edx
=> movl %edx, (%rax) #set the value of val to value in edx
addl $1, -4(%rbp)
jmp .L3
.L4:
nop
popq %rbp
ret
main:
pushq %rbp
movq %rsp, %rbp
subq $16, %rsp
movl $7, -4(%rbp)
leaq -4(%rbp), %rax
movq %rax, %rdi #move the address 7 to rdi
call add
movl $0, %eax
leave
ret
Now consider, say, two threads, one executing ++var and the other --var with var initially,
equal to 4. Since the two threads are independent there are many possible sequences of instructions,
one of them is shown below. As you can see, the final value of var in this case is 3. Since other
sequences are possible, one could get 3,4, or 5 depending which thread finishes first. What is worse, if
the two threads are executing in a long loop, for every iteration we might get a different value. This is called a
race condition and the part of the code where the shared variable is accesseed is called critical section. That is why in the previous code we got non consistent results.
mov var edx1 # edx1=4
mov var edx2 # edx2=4
inc edx1 # edx1=5
dec edx2 # edx2=3
mov edx1 var # var=5
mov edx2 var # var=3
std::mutex
One way to synchronize access to a critical section is to use std::mutex. Essentially, std::mutex
behaves as a lock. We modify the previous code as follows:
#include <mutex>
std::mutex m;
void add(int& val) {
m.lock();
for (int i = 0; i < NUM_ITERATIONS; ++i)
++val;
m.unlock();
}
void sub(int& val) {
m.lock();
for (int i = 0; i < NUM_ITERATIONS; ++i)
--val;
m.unlock();
}
You can try the complete code here
std::lock_guard
Sometimes the above approach leads to problems since the std::mutex is not unlocked automatically. When the code base gets complicated, a programmer might simply forget to unlock a mutex and a deadlock occurs. More importantly, suppose that before we call std::mutex::unlock() a exception occurs. This means that the unlock statement is never reached.
Consider the code below.
#include <string>
#include <random>
std::random_device rd;
std::uniform_int_distribution<> dist(50, 500);
std::mutex m;
int add(const std::vector<std::string>& values) {
int val = 0;
std::this_thread::sleep_for(std::chrono::milliseconds(dist(rd)));
m.lock();
for (int i = 0; i < values.size(); ++i)
val += std::stoi(values[i]);
m.unlock();
return val;
}
int sub(const std::vector<std::string>& values) {
int val = 0;
/* wait twice as much as add on average */
std::this_thread::sleep_for(std::chrono::milliseconds(2*dist(rd)));
m.lock();
for (int i = 0; i < values.size(); ++i)
val -= std::stoi(values[i]);
m.unlock();
return val;
}
template <typename T>
void threadf(int& val, const T& values
, int (*f)(const T&)) {
/* we MUST catch exception here.
* it cannot be caught by main
*/
try {
val += f(values);
}
catch (std::exception& e) {
std::cout << e.what() << "\n";
}
}
The functions add and sub will be called from two different threads. Each locks mutex m before
performing their operations, which is to convert a set of strings to integers and add/sub them to the passed variable.
The sleep_for is added such that add locks the mutex first, most of the time.
The std::stoi will raise an exception if the input string cannot be converted to an integer.
Below is the main function. Notice that the input to add will be the vector evalues which contains
the character p as a first value. This will cause an exception in add which will be caught in threadf,
causing sub to hang since it is waiting for the release of a locked mutex that will not be released.
NOTE an exception raised in a thread cannot be caught by the parent thread.
int main()
{
using V = std::vector<std::string>;
int sum = 0;
V values{ "1","2","3","4","5" };
V evalues{ "p","2","3","4","5" };//causes exception in std::stoi
/* due to exception this thread will exit without releasing mutex*/
std::thread t1(threadf<V>, std::ref(sum), std::ref(evalues), add);
/* this one will most probably hang waiting for the mutex to be released*/
std::thread t2(threadf<V>, std::ref(sum), std::ref(values), sub);
t1.join();
t2.join();
std::cout << sum << "\n";
}
For these reasons C++ supplies us with a convenient object std::lock_guard<std::mutex> which is basically
a wrapper object around a std::mutex. It follows the resource acquisition is initialization (RAII) idiom.
This means that the mutex is locked/unlocked when the object is created/destroyed. Using std::lock_guard is easy.
Simply replace std::mutex m; with std::lock_guard<std::mutex> g(m); and remove m.unlock. When the
lock_guard object is created, it locks the mutex, and when it is destroyed it unlocks it automatically.
int add(const std::vector<std::string>& values) {
int val = 0;
std::this_thread::sleep_for(std::chrono::milliseconds(dist(rd)));
std::lock_guard<std::mutex> g(m);
for (int i = 0; i < values.size(); ++i)
val += std::stoi(values[i]);
return val;
}
You can try the lock_guard version here
Deadlocks with lock_guards
Even with the use of lock_guards deadlocks can still occur. Consider the classic producer/consumer problem.
A producer thread adds_ data to a finite buffer and a consumer thread removes the data from the buffer.
To work properly the producer checks if the buffer is full before adding elements and the consumer checks if it is empty before removing elements.
We keep track of the number of elements with a size variable. Since both the buffer (array below) and the size (size below) are shared between the two threads we use a lock_guard for each. Since each thread needs to lock both guards
to proceed, if each locks a guard a deadlock will occur. This happens in the code below because the two threads access
the guards in a __different order.
Common code.
using m = std::chrono::milliseconds;
#define NUM 150
const int capacity = 1<<10;
int size = 0;
int array[capacity]{};
std::mutex a, s;// to protect array and size
std::random_device rd;
std::uniform_int_distribution<> dist(1, 5);
Consumer .
void consumer() {
int val;
int count = 0;
while (count< NUM) {
std::this_thread::sleep_for(m(dist(rd)*2) );
/* wrong order of locking*/
std::lock_guard ga(a);
std::lock_guard gs(s);
if (size != 0) {
val = array[size--];
count++;
std::cout << "\r\t" <<count;
std::cout.flush();
}
}
}
Producer.
int value = 9;
int count=0,tmp;
while(count<NUM ) {
std::this_thread::sleep_for(m(dist(rd)));
std::lock_guard gs(s);
if (size == capacity)continue;
tmp = size++;
std::lock_guard ga(a);
array[tmp] = value;
count++;
std::cout << "\r" <<count;
std::cout.flush();
}
}
A few runs of the above program produce an output similar to the image below

As you can see, in all the runs above, the threads could not complete the 150 “read/write” operations before entering in a deadlock.
A rule of thumb is to always lock mutexes in the same order.
Readers-Writers
In some situations, a simple locking/unlocking is not satisfactory. This is typically the case when some threads do not modify the shared data as in the classical case of Readers-Writers. In this scenario we can have two types of threads: readers and writers. As the name implies the readers threads do not modify the shared data whereas the writers do. Simply using a lock/unlock mechanism will prevent multiple readers from reading “at the same time” , which speeds things up, even though there is no harm in doing so. Before proceeding let us review the constraints on the threads
- A reader can access the shared data even if other readers are doing so
- A reader cannot access the shared data if a writer is doing so
- A writer cannot access the data if any thread is doing so.
The classical solution is to have the first reader lock a mutex and the last one unlocks it. To be able to implement the above logic we need to resolve the following two issues
- How to keep track of the first/last reader thread. This is done by keeping a counter of the number of reader threads.
- We cannot unlock a
std::mutexthat was locked by another thread.
Both of these problems are solved using std::shared_mutex.
A std::shared_mutex has two levels of access: exclusive, only one thread can own the mutex, and shared,
multiple threads can share the ownership.
#include <iostream>
#include <vector>
#include <random>
#include <thread>
#include <mutex>
#include <shared_mutex>
std::random_device e;
std::uniform_int_distribution<> dist(1, 50);
std::vector<int> v;// shared buffer
std::shared_mutex wrt;
class Reader {
public:
void operator() () {
int sum = 0;
std::this_thread::sleep_for(std::chrono::milliseconds(dist(e) * 100));
wrt.lock_shared();
std::cout << "Reader thread " << std::this_thread::get_id() << " started\n";
for (auto x : v) {
sum += x;
std::this_thread::sleep_for(std::chrono::milliseconds(10));
}
std::cout << " Reader thread " << std::this_thread::get_id() << " ended\n";
wrt.unlock_shared();
if (sum != 0) std::cout << "sum in thread " << std::this_thread::get_id() << " is " << sum << std::endl;
}
};
class Writer {
public:
Writer() {
}
void operator() () {
int value = dist(e);
std::this_thread::sleep_for(std::chrono::milliseconds(dist(e) * 100));
wrt.lock();
std::cout << " Writer thread " << std::this_thread::get_id() << " started\n";
for (auto& x : v) {
x = value;
value = -value;
std::this_thread::sleep_for(std::chrono::milliseconds(10));
}
std::cout << " Writer thread " << std::this_thread::get_id() << " ended\n";
wrt.unlock();
}
};
int main()
{
std::cout << "Concurrency 2.3 \n";
std::cout << "------------------------------\n";
int value = 1;
for (int i = 0; i < 100; i++) {
v.push_back(value);
value = -value;
}
for (int i = 0; i < 4; i++) {
std::cout << "Trial " << i << std::endl;
std::vector<std::thread> mythreads;
for (int i = 0; i < 2; i++) {
Reader r1, r2;
Writer w;
std::thread t1(r1);
std::thread t2(w);
std::thread t3(r2);
mythreads.push_back(std::move(t1));
mythreads.push_back(std::move(t2));
mythreads.push_back(std::move(t3));
}
for (auto& t : mythreads)
t.join();
std::cout << "----------------" << std::endl;
}
}
As one can see, in the above example, the writer calls shared_mutex::lock() which is an attempt to gain exclusive access to the lock. If successful, all calls to lock and lock_shared are blocked until
the writer releases the lock. The readers call shared_mutex::lock_shared, which is an attempt to gain shared
access to the lock. If successful, all calls to lock are blocked whereas calls to lock_shared are allowed.
std::(unique/shared)_lock
These lock a std::shared_mutex in a exclusive/shared modes. A std::unique_lock has a richer interface
than std::lock_guard. In all situations a lock_guard can be replaced by a unique_lock but not the other
way around. For example, the mutex held by a std::lock_guard will be released only when the lock_guard is destructed whereas std::unique_lock has an unlock() member function. This comes in handy in many situations, particularly, as we will see later, when used with condition variables.
In the reader/writers problem we could modify the reader as follows:
- replace
wrt.lock_shared();withstd::shared_lock<std::shared_mutex> lck(wrt); - remove
wrt.unlock_shared();.
And in the writer
- replace
wrt.lock();withstd::unique_lock<std::shared_mutex> lck(wrt); - remove
wrt.unlock();
Atomics
In the motivational example in the beginning of the chapter we use mutexes to synchronize access to a shared variable.
For such simple scenarios, C++ provides the std::atomic types. Once a variable is declared as atomic, it becomes thread safe.
For example, in the Motivating Example , where the shared variables x and y are accessed we modify the code as follows:
- The declarations
std::atomic<int> y{0}; std::atomic<int> x{0}; - The function calls
void add(std::atomic<int>& val) {
for (int i = 0; i < NUM_ITERATIONS; ++i)
++val;
}
void sub(std::atomic<int> & val) {
for (int i = 0; i < NUM_ITERATIONS; ++i)
--val;
}
Condition Variables
Condition variables allow threads to wait for events. The C++ library provides two versions of condition variables,
std::condition_variable and std::condition_variable_any, both defined in the header <condition_variable>. In this course we will use the first version only.
A condition variable, cv, is used in conjunction with a std::unique_lock. We have mentioned before that
a unique_lock has a richer interface than std::lock_guard. One of the additional features is the ability to explicitly lock and unlock the mutex it holds, in addition to the implicit lock/unlock operations done when constructed and destructed. Typical usage :
/* global declarations */
std::mutex m;
std::condition_variable vc;
/* usage in thread */
std::unique_lock<std::mutex> lck(m);
cv.wait(lck);
The call to cv.wait(lck) does the following:
- calls
lck.unlock(). - blocks thread and adds it to list of threads waiting on *this
When cv receives notification :
- wake up thread
- calls lck.lock()
Usually, another version of wait is used, std::condition_variable::wait() .
template<typename Predicate >
void wait( std::unique_lock<std::mutex>& lck, Predicate pred );
The above is equivalent to
while(!pred()){
wait(lck);
}
Simple example
- We use condition variables to implement a simple example
- A reader thread receives notification when a writer is done
using namespace std::literals::chrono_literals;
#include <condition_variable>
std::mutex m;
std::condition_variable condVar;
bool ready{ false };
void writeT() {
std::unique_lock<std::mutex> lck(m);
ready = true;
std::cout << "wrote data\n";
condVar.notify_one();
std::this_thread::sleep_for(10s);
std::cout << "writer finished\n";
}
void readT() {
std::cout << "Waiting for data\n";
std::unique_lock<std::mutex> lck(m);
condVar.wait(lck, []() {return ready; });
std::cout << "Data received \n";
}
### Main funtion
```cpp
int main() {
std::thread t1(readT);
std::this_thread::sleep_for(10s);
std::thread t2(writeT);
t1.join();
t2.join();
}
Another example
- We illustrate the detailed working of conditions variables
- with a slightly more complicated version of the previous example
void threadf() {
std::this_thread::sleep_for(5s);
std::unique_lock<std::mutex> lck(m);
std::cout << "F started\t " << currentT() << "\n";
std::this_thread::sleep_for(5s);
condVar.notify_one();
std::cout << "notification sent\t" << currentT() << "\n";
lck.unlock();
std::this_thread::sleep_for(1s);
lck.lock();
std::cout << "F is done\t" << currentT() << "\n";
}
void threadg() {
std::unique_lock<std::mutex> lck(m);
std::cout << "Waiting for F\n";
currentT();//initialize clock
condVar.wait(lck);
std::cout << "notification received \t" << currentT() << "\n";
std::this_thread::sleep_for(5s);
std::cout << "G is done \t" << currentT() << "\n";
}
int main() {
std::thread t1(threadf);
std::thread t2(threadg);
t1.join();
t2.join();
}
Barriers
A barrier is a general synchronization method to ensure that
- The “next” step of computation does not start until all threads have finished the previous step
- A barrier can be implemented using condition variables.
- C++20 introduced a barrier class.
Barrier using Condition Variables
using Duration = std::chrono::seconds;
int num_threads = 10;
std::mutex m;
std::condition_variable condVar;
int count = 0;
void threadf(int i,Duration d) {
std::this_thread::sleep_for(d);
std::cout << i << " started\n";
std::unique_lock<std::mutex> lck(m);
++count;
condVar.wait(lck, []() {return count == num_threads; });
condVar.notify_one();
std::cout << i << " ended\n";
}
int main()
{
std::random_device rd;
std::uniform_int_distribution<> dist(1, 5);
std::vector<std::thread> mythreads;
for (int i = 0; i < num_threads - 1; ++i)
mythreads.push_back(
std::thread(threadf, i, Duration(dist(rd)))
);
/* let them wait for the last thread */
mythreads.push_back(
std::thread(threadf, num_threads - 1, Duration(15))
);
for (auto& t:mythreads)
t.join();
}
Using C++20 barrier class
- In C++20 we can use a barrier class defined in
<barrier> - the main function is the same as before, the
threadfis modified as follows#include <barrier> std::barrier barrier{ num_threads }; void threadf(int i, Duration d) { std::this_thread::sleep_for(d); std::cout << i << " started\n"; barrier.arrive_and_wait(); std::cout << i << " ended\n"; }
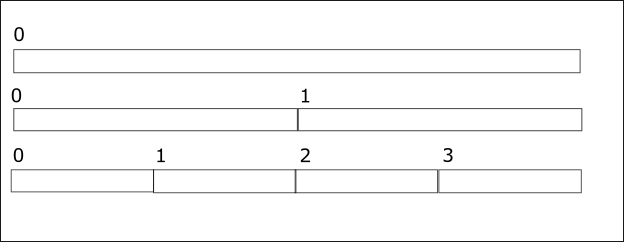
Parallel mergesort
- In this example we use a barrier to implement a parallel version of merge sort
- The basic strategy is similar to what we have done before.
- But in this case we need the threads to wait for each other after each “step”
- The steps are shown in the figure below, starting from the bottom.
- The example in the figure uses 4 threads, so initially the range is divided into four subranges.
The steps are as follows:
- Each thread sorts the corresponding range: 0-1,1-2,2-3,3-4
- All thread wait for each other using a barrier
- If the thread index is even it continues, otherwise it exits
- In the figure, threads 0,2 continue, 1 and 3 exit
- The thread divides its index by 2: 0/2=0,2/2=1
- Each thread merges its range and the one to the “right”
- goto step 2
Futures/Promises
- C++ provides us with another tools to perform asynchronous work: tasks.
- A task consists of a communication channel with a two endpoints: promise and future.
- The computation results is set in the promise part and retrieved in the future part.
### Simple example
- We introduce the promise/future concept with a trivial example.
#include <future>
std::future<int> useless(int val) {
std::promise<int> p;
p.set_value(2 * val);
return p.get_future();
}
int main() {
std::future<int> fut = useless(8);
std::cout << fut.get() << "\n";
}
More realistic example
- In this example we illustrate the usage of promise/future to get the result of the computation of a thread
- Notice that the call to
std::promise::get()blocks until the result is available.
void threadf(std::promise<int> p) {
std::this_thread::sleep_for(5s);
p.set_value(19);
}
int main() {
std::promise<int> prom;
std::future<int> fut = prom.get_future();
std::thread t(threadf, std::move(prom));
std::cout << "waiting for result\n";
std::cout << fut.get() << "\n";
t.join();
}
Using async
- Instead of managing our own threads, C++ provides us with
std::async - Below we show an example where an asynchronous call is made to function
asyncf - The return value of
asyncfis encapsulated in the future returned byasync - Instead of blocking until
asyncfreturns, we can perform some work - Every once and a while we check if the return value is available.
int asyncf(int val) {
std::this_thread::sleep_for(5s);
return 2 * val;
}
int main()
{
std::future<int> fut = std::async(asyncf, 23);
std::future_status status;
do {
std::cout << "Result not ready. Please wait.\n";
status = fut.wait_for(1s);
} while (status != std::future_status::ready);
std::cout << fut.get() << "\n";
}
Downloading files using async
- In this example, we use libcurl to asynchronously download a file
- The easiest way to install libcurl using vcpkg (https://github.com/Microsoft/vcpkg)